Indian Vehicle Detection using YOLO11
Posted on May 4, 2026
2 min read
By Devendrasingh Solanki
Indian Vehicle Detection using YOLO11 (Real-World System)
Traffic in India doesn’t follow rules — and that’s exactly what makes vehicle detection difficult.
In a single frame, you’ll see two-wheelers cutting across lanes, auto-rickshaws overlapping with cars, and frequent occlusions. Most standard object detection systems struggle in these conditions because they are built for structured environments.
This project focuses on building a reliable vehicle detection and counting system for real-world Indian traffic, not just a demo model.
What Actually Fails in Practice
A basic YOLO-based system works well on images, but fails in real scenarios:
- Same vehicle counted multiple times
- Vehicles missed during occlusion
- No understanding of direction
- Noise from irrelevant regions
So the problem is not detection — it’s consistency over time.
Core Idea
Instead of relying only on detection, the system is designed as:
Detection + Tracking + Motion Logic
Pipeline:
Input → Detection → Tracking → ROI → Line Crossing → Direction → Output
Each step fixes a real issue observed during testing.
System Architecture
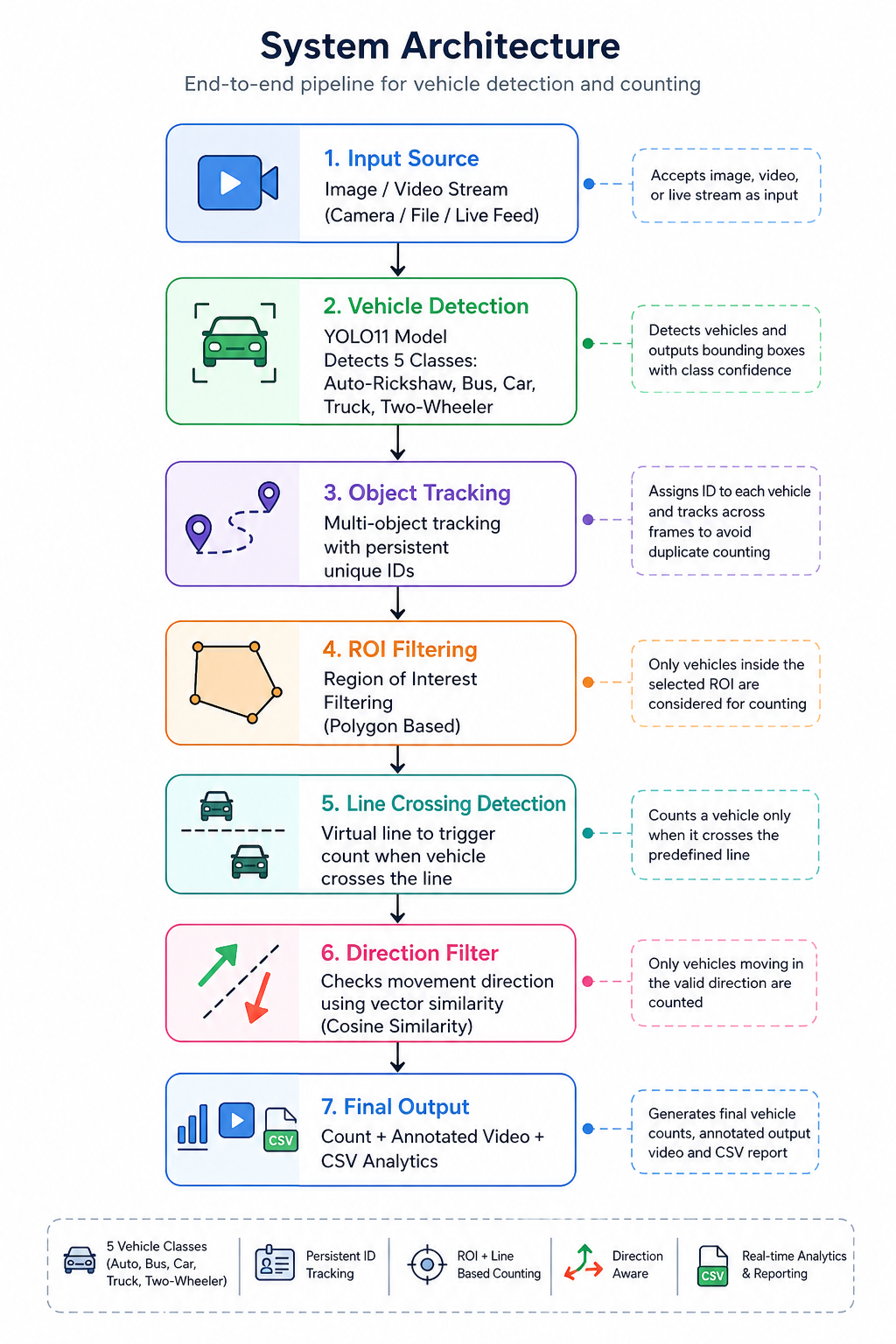
Why This Architecture Works
Each stage exists because something broke without it:
- Detection (YOLO11) → Finds vehicles but is noisy
- Tracking → Prevents duplicate counting
- ROI Filtering → Removes unnecessary detections
- Line Crossing → Converts detections into countable events
- Direction Filtering → Ensures meaningful traffic flow analysis
This modular approach makes the system stable and production-ready.
Vehicle Detection
The model used is YOLO11x, trained on ~48,000 Indian traffic images.
Classes:
- Auto-Rickshaw
- Car
- Bus
- Truck
- Two-Wheeler
Some classes like Bicycle and Tractor were removed due to poor annotations, which improved overall accuracy.
Tracking (What Makes It Reliable)
Each vehicle is assigned a persistent ID:
track_history[track_id].append(center_point)
This ensures:
- No duplicate counting
- Stable tracking across frames
- Enables direction analysis
ROI Filtering
Only vehicles inside a defined region are processed:
if point_in_polygon(center, roi_polygon):
process_detection()
This removes background noise and improves accuracy.
Line Crossing Logic
Vehicles are counted only when crossing a virtual line:
if prev_y < line_y and curr_y >= line_y:
count += 1
This converts detection into events, not frame-based counts.
Direction Filtering
Direction is calculated using vector similarity:
cos_theta = dot(track_vector, direction_vector)
if cos_theta > threshold:
valid_direction = True
This ensures:
- Only valid traffic flow is counted
- Wrong-direction vehicles are ignored
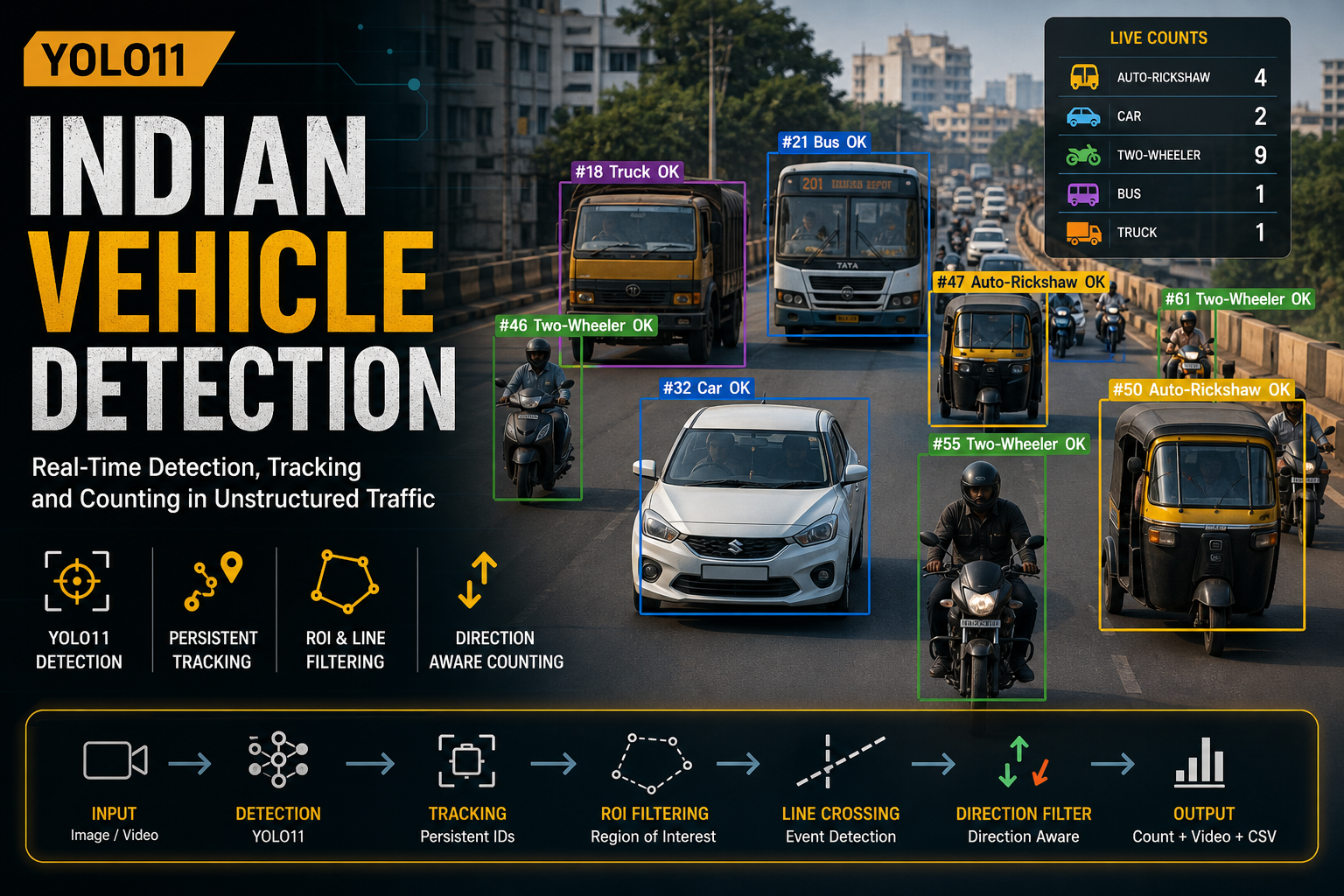
Sample Output (Real Inference)

What’s Happening in This Frame
This output represents the full system working together:
- Bounding Boxes → Detection
- Tracking IDs (#50, #55, etc.) → Persistent tracking
- Class Labels → Vehicle types
- Live Counts (Top Left)
- Auto-Rickshaw: 4
- Car: 2
- Two-Wheeler: 9
- “OK” Label → Vehicle passed:
- ROI filter
- Direction check
- Line crossing condition
So this is not raw detection — it’s validated counting logic.
What This Output Proves
From real testing:
- Works in dense traffic
- Handles occlusion reasonably well
- No duplicate counting
- Stable tracking IDs
- Accurate counts based on movement
The biggest improvement came from:
Improving logic around the model — not just the model itself.
One Mistake That Changed the System
Initially, I used only detection + line crossing.
In dense traffic:
- Vehicles were counted multiple times
- Lane changes broke counting
The fix was introducing:
Tracking + Direction Filtering together
That made the system stable.
System Design (ML Pipeline)
The project follows a structured ML pipeline:
- Data Ingestion
- Data Validation
- Data Preprocessing
- Model Training
- Evaluation
- Deployment
Features:
- Stage-wise execution
- Reproducibility
- Easy retraining
Outputs
The system generates:
- Annotated video
- Vehicle counts
- CSV analytics
- Direction-filtered insights
Future Improvements
- Multi-camera tracking
- Speed estimation
- TensorRT optimization
- Real-time dashboard
- Cloud deployment
Conclusion
This project goes beyond object detection.
By combining:
- YOLO11 detection
- Persistent tracking
- Direction-aware filtering
the system becomes practical for:
- Traffic monitoring
- Smart city applications
- Urban analytics
Author
Devendrasingh Solanki
Machine Learning Developer

